揭祕掃地機器人巨頭科沃斯的祕密!雙路佈局導航技術20年
智東西(公眾號:zhidxcom)
文 | Kiva
如今掃地機器人行業已經走過了三個重要階段:第一代的隨機式清掃、第二代規劃式清掃和第三代的導航建圖式清掃。而對於導航建圖,目前業內主流方案有兩種,基於鐳射雷達的LDS SLAM和基於攝像頭的VSLAM。這兩種技術路徑各有優勢,在業內也處於繁榮發展的狀態,吸引了不少創業公司開發導航方案。
掃地機器人廠商也會根據自己的優勢和產品定位選擇不同的導航方案進行佈局。Neato、米家、石頭、海爾、浦桑尼克等都傾向於採用LDS SLAM方案,而iRobot、Dyson、ILFE、LG等則傾向於VSLAM。而國內掃地機器人巨頭科沃斯則選擇了雙線全面的佈局,是業內唯一覆蓋兩大方案的廠商。
在國內掃地機器人領域,科沃斯不僅市場份額佔據著半壁江山,穩站國內市場第一梯隊,同時它也是紮根行業最久的企業,成立於1998年,2000年科沃斯成立了獨立研發團隊,開始佈局服務機器人業務,並於2009年推出第一款機器人地寶系列,翻開了國內掃地機器人研發的序章。
憑藉著在導航技術上20多年的積累和產品場景應用經驗,科沃斯基於基礎的導航功能,為使用者提供了更多細節方面優質的產品和應用體驗。本文將深度分析科沃斯的雙路導航技術,以及基於這兩大方案科沃斯在產品細節和體驗上所作出的努力。
一、掃地機器人兩大主流導航建圖方案:LDS SLAM和VSLAM
一般來說,掃地機器人的導航建圖主要分為四個步驟:感測器採集資訊(其中的感測器包括:鐳射雷達、影象感測器、里程計、懸崖感測器等)、定位與建圖( SLAM)、路徑規劃、運動控制。這四個步驟環環相扣,構成了導航系統。其核心是感測器的資訊採集能力以及SLAM演算法和路徑規劃演算法的有效性。
對於導航建圖,目前業內主流方案有兩種,基於鐳射雷達的LDS SLAM和基於攝像頭的VSLAM,兩種技術路徑各有優勢:
1、高精度的LDS SLAM方案
鐳射導航LDS SLAM的原理是鐳射測距,是以鐳射雷達作為感測器,通過發射鐳射接受反射,利用反射回的位移偏差對物體進行定位。
這種方法能夠獲得精度較高的距離資訊,可靠性高,目前在業內已經非常成熟。但其缺陷在於成本相對較高,並且硬體凸起的結構會增加掃地機器人的厚度,降低通過性。
2、資料更豐富的VSLAM方案
與鐳射導航LDS SLAM不同的是,視覺導航VSLAM是以攝像頭作為感測器,相比能夠直接獲取方向和距離資料的鐳射LDS SLAM技術,VSLAM獲取的是灰度或彩色圖案,對於障礙點只能獲取方向而無法直接測量距離。要想計算該點的距離,需要相機挪動一個位置再觀察一次,按照三角原理進行推算。
其優勢在於,採集的資料更豐富,成本更低。隨著手機行業對於鏡頭的強勁需求,使得整個CMOS、鏡頭製造行業迅猛發展,帶動其成本的降低,這也是VSLAM發展起來的重要原因。未來隨著演算法的進步,VSLAM會有更多的功能實現的可能。
LDS SLAM與VSLAM各具優劣,彼此之間並不存在明顯的替代關係。而隨著掃地機器人市場進入高速市場滲透期,產品將更加多元化,這兩種技術未來將在應用場景上各有區分。
二、雙路徑佈局導航技術,狠抓產品細節和功能體驗
科沃斯是目前業內產品系列最全的企業,其產品涵蓋了低端的隨機碰撞式以及中高階導航機器人,技術路線也覆蓋了LDS和VSLAM兩大主流路徑,是業內唯一覆蓋兩大方案的廠商。科沃斯憑藉在行業深扎20多年的經驗,在兩大導航技術上的基礎上,開發了更多細緻的產品功能設計和創新式體驗。
在LDS SLAM導航方面,科沃斯在業內也取得了不少成就。應用LDS SLAM的掃地機器人會有一大痛點問題,即鐳射雷達模組會在機身上形成凸起,增加掃地機器人的高度。這對於需要鑽入不同家居裝置底部進行清掃的掃地機器人來說是不利的。

▲科沃斯掃地機器人DEEBOT T5
科沃斯憑藉在產業鏈多年的深厚積累已能夠做到將搭載鐳射雷達模組的掃地機器人產品厚度降低到業內最低水平,同時,在鐳射雷達感測器成本控制上也是目前業內做的最好的。比如在地寶T5上,科沃斯在搭載了LDS和超大水箱的情況下,將產品厚度做到了9.3cm,是業內同級別產品中最薄的。

▲科沃斯掃地機器人DEEBOT DJ35
2013年科沃斯開始在VSLAM上發力,如今已經推出了多款經典產品。2018年科沃斯推出了全新的視覺導航產品地寶DJ35,首次搭載科沃斯全新Smart Eye視覺導航技術以及科沃斯藍鯨清潔系統2.0。利用攝像頭感測器對立體空間進行視覺捕捉,提取特徵點,配合SLAM演算法,實現視覺化全域性規劃清潔,覆蓋率更高。

科沃斯也在細緻地打磨產品品質,在各個細節上提升產品品質和使用者的體驗,並且給使用者提供了非常豐富的個性化選擇。比如科沃斯的Smart Navi2.0系統,基於LDS感測器等元件,可以360度全方位識別家居環境資訊,配合升級的SLAM演算法,使掃地機器人能夠同時執行建圖、戶型識別、路徑規劃和清掃工作。
科沃斯還基於App控制在該系統中創新式開發了眾多功能,如斷點續掃、重定位續掃、分割槽清潔、劃區清潔、設定虛擬區/拖地禁區等,成為科沃斯掃地機器人在同類產品競爭中具有的重要優勢。

▲分割槽清掃邏輯圖
舉例來說,科沃斯很早便在LDS規劃方案中加入了地圖分割槽功能,其方案能夠直接根據圖上的分割槽資訊逐一清掃各個區域,減少進出統一個房間的次數和在統一個房間內的沿邊次數。
在小範圍清掃方面,科沃斯的解決方案讓使用者只需要在手機上,使用自定義功能定義待清掃點及其範圍大小,就可以實現精準高效的小區域清掃。
在傳統方案中,如果在清掃過程中搬動機器人,會造成地圖丟失。科沃斯建立了動態重定位功能,可以讓機器人在新位置小範圍移動後,判斷自身所處位置,根據定位資訊回覆之前預存的地圖並進行清掃。
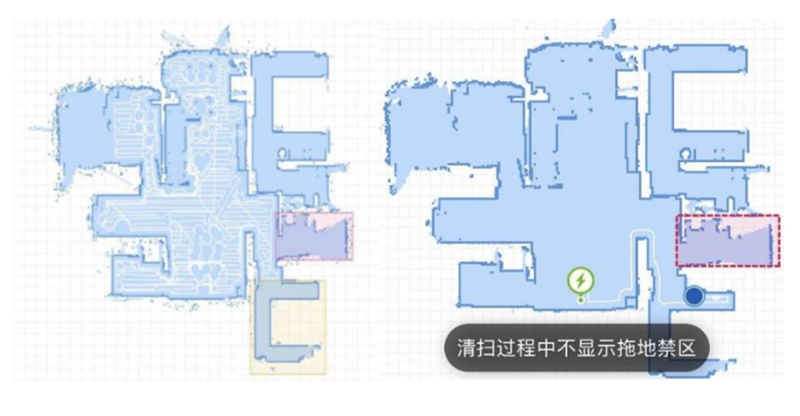
▲虛擬牆和虛擬禁區功能
同時,Smart Navi2.0還支援地圖的實時更新,如果使用者上次清掃時把某個房間門關上了,但這次還需要清掃該房間,機器人可以識別到上次清掃時未發現的新區域,直接納入到已有地圖中,並進入該區域清掃。地寶系列還可以通過App設定虛擬牆和虛擬禁區,當用戶不想要清掃廚房或者其他區域時,可以使用此功能。
值得一提的是科沃斯是業內第一傢俱有地圖自動感知記憶功能的廠商,僅在機身內部最多可記憶3張地圖。當用戶進行場景切換時,比如將掃地機器人從一樓挪到二樓,機器人會自動對場景進行識別,進入新地圖模式。
這些功能雖然看起來細小、瑣碎,但無一不是使用者在清掃家庭場景中實實在在存在的問題。從如此細分的方案中,我們可以看出科沃斯真正從使用者使用角度出發,將不同的需求分割成精準的問題,並提出針對性的解決方案。
而這與科沃斯在導航建圖技術上的深厚積累是緊密相關的,正是憑藉了在LDS SLAM和VSLAM雙路導航技術上的全面佈局,科沃斯才能在快速洞察使用者精細化需求後,快速推出解決方案並實現產品化。
三、追求極致體驗,科沃斯為掃地機器人注入AI新動力
目前,LDS SLAM與VSLAM兩種導航方案可以很好地滿足使用者的日常需求,而為了進一步提升使用者的體驗,科沃斯創新式地將AI技術引入到產品中。
2019年一開年,科沃斯推出的新產品DG70,就搭載了AIVITM人工智慧和視覺識別系統,讓掃地機器人具有了物體識別能力,能夠識別並判斷家庭場景中的電線、鞋子、布等幾大類別產品,並提供不同的清掃策略。科沃斯還將繼續擴充套件物體識別種類,利用軟體更新的方式對產品進行升級。
科沃斯曾提出了讓機器人從“工具”到“管家”再到“伴侶”的角色路徑。為了實現這一目標,科沃斯在人工智慧領域也在持續投入和佈局。
在人才培養方面,科沃斯不僅與南京大學成立了聯合實驗室,還在2018年7月成立了南京人工智慧研究院,致力於“人工智慧+機器人”研究。此外,科沃斯還在致力於建設機器人網際網路生態圈,搭建人工智慧平臺的核心技術和基礎設施,為提升家庭服務機器人產品在環境識別、人機互動、深度學習等智慧化程度而努力。
毋庸置疑的是人工智慧技術將給服務機器人帶來更多的技術革新,這已經是目前行業公認的發展趨勢。隨著人工智慧技術的進一步落地,服務機器人產品將在原有基礎上,增加更為智慧的產品能力和豐富的產品體驗。
結語:紮根行業20年,科沃斯以技術撐起掃地機器人極致體驗
作為國內掃地機器人入局最早的企業,科沃斯已深扎家庭場景20餘年。在這個過程中,科沃斯以紮實的導航等技術功底,著眼細節,不斷為使用者帶來實用、貼心的創新產品。